
AGV重载搬运机器人导航方式选型指南,精准与灵活的平衡之道
在智能物流与制造浪潮中,重载AGV正悄然重塑现代工厂的物料搬运模式。
在大型制造企业的车间内,一台承载着数吨重巨型卷料的重载AGV,正穿梭于仅容车身通过的窄巷。举升、对接、落料……精准停靠在加工设备前,它将重型物料送入加工位,一气呵成。
导航系统作为AGV的“智能大脑”,直接决定了设备在复杂环境中的适应性、精度与效率。选型不当,不仅会造成投资浪费,更可能导致整个自动化系统无法发挥预期效能。
一、导航技术剖析:五种主流方式的原理与特性
AGV重载搬运机器人的导航方式,决定了它在复杂环境中的定位精度、路径灵活性和环境适应性。不同的导航技术各有其技术特点,适用于不同的应用场景。
磁导航作为最传统的导航方式之一,通过在生产路径上铺设磁条,AGV通过传感器识别磁场信号实现导航。这种方式技术成熟,成本较低,但路径更改困难,需要大量的地面施工工作。
激光导航代表了更高阶的技术水平,分为反光板导航与SLAM导航(自然导航)两种。反光板导航通过在AGV行驶路径周围安装精确的反射板,AGV通过发射激光束并采集反射信号,通过三角几何运算确定当前位置和方向。
而SLAM导航(即时定位与地图构建)则无需任何辅助标记,通过激光雷达对场景的观测,实时创建地图并修正机器人位置,真正实现了对作业环境的零改造。
惯性导航在AGV上安装陀螺仪,通过计算陀螺仪偏差信号和采集地面定位块信号来确定自身位置和方向。这种导航方式灵活性强,易于组合兼容,但制造成本较高,精度与陀螺仪的制造质量密切相关。
视觉导航基于相机拍摄地面或周围的标记、图案,通过图像识别实现定位与导航。这种导航方式硬件成本低、定位精准,但对使用环境(地面、光线等)要求较高。
二维码导航结合了惯性导航技术,通过扫描地面二维码获取位置信息,能达到毫米级的高精度,但需要定期维护,适合全自动无人化环境。
二、技术对比分析:为重载场景量身定制
在重载搬运场景中,导航方式的选择关乎整个系统的稳定与效能。各种导航技术在精度、灵活性、维护成本和实施难度方面各有特点。
下表对比了五种主要导航方式在重载AGV应用中的关键特性:
| 导航方式 | 定位精度 | 路径灵活性 | 维护成本 | 实施难度 | 环境要求 |
|---|---|---|---|---|---|
| 磁导航 | 中等 | 低 | 较高 | 低 | 非金属地面 |
| 激光导航 | 高(厘米级) | 高 | 低 | 高 | 无特别要求 |
| 惯性导航 | 高 | 中等 | 中等 | 中等 | 无轨道导航 |
| 视觉导航 | 高 | 高 | 低 | 高 | 光线、地面纹理要求高 |
| 二维码导航 | 高(毫米级) | 低 | 较高 | 中等 | 地面平整度高 |
从对比中可以看出,激光导航(特别是SLAM自然导航)在灵活性和维护成本方面表现优异,逐渐成为重载AGV导航的首选方案。而磁导航虽然实施简单,但路径更改困难,在需要频繁调整路径的现代柔性制造环境中显得力不从心。
值得注意的是,在高精度对接场景中,二维码导航能达到毫米级精度,而激光导航通常只能达到厘米级精度。但对于大多数重载搬运场景,厘米级精度已能满足需求,且激光导航无需在地面铺设任何标识,保持了作业环境的整洁与安全。
三、选型决策指南:关键因素与场景适配
为重载AGV选择导航方式,需综合考虑应用场景、负载特性、环境条件和经济因素,没有放之四海而皆准的方案。
环境复杂度与路径变化频率是首要考量因素。在通道狭窄、设备密集的车间,激光SLAM导航展现出明显优势,它无需在地面铺设任何标识,实现了零环境改造。对于路径固定、流程不变的应用场景,磁导航等传统方式因技术成熟、成本低仍是不错的选择。
定位精度要求直接关系到导航技术的选择。高精度装配场景可能需要毫米级的二维码导航,而大多数搬运任务厘米级的激光导航已绰绰有余。
负载特性与运动性能对导航系统提出了特殊要求。重载AGV在搬运过程中惯性大,对控制的精确性和稳定性要求极高。如一些企业的重载全向AGV,在4吨负载下实现了毫米级纠偏,这对导航系统的稳定性和精度提出了极高要求。
系统扩展性与智能化需求也不容忽视。随着智能制造的发展,AGV系统需要与上位管理系统无缝集成,实现数据共享和智能调度。一些企业自主研发的智能调度平台,能实时指挥大规模“机器人军团”,融合了多目标优化调度算法、全局路径规划等前沿技术。
以下流程图展示了重载AGV导航方式选型的系统化决策过程: 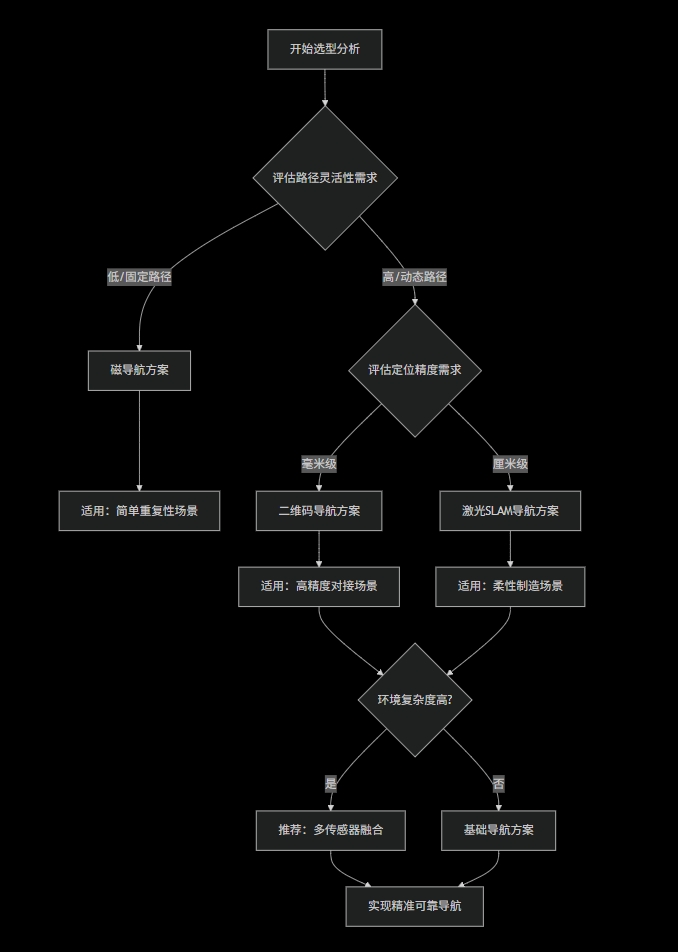
四、行业应用解析:导航技术在实际场景中的表现
不同的行业场景对重载AGV导航方式有不同要求,选对导航方案是项目成功的关键。
在重型制造业,如金属加工、新能源材料行业,生产环境通道狭窄、机台密集,对AGV的导航精度和灵活性要求极高。一些企业采用了激光导航与视觉识别相结合的方案,通过“二次对接机构”和三维点云视觉识别,实现了在窄巷道内的精准对接与搬运。
在物流仓储领域,特别是高动态变化的电商仓库,激光SLAM导航大放异彩。这种导航方式不需要地面任何标识,也不改变工作环境,使得机器人部署更快。
在户外或特殊环境下,如港口、机场等,GPS导航也有应用空间。但随着激光SLAM技术的成熟和成本下降,其在户外环境的适应性也在不断增强。
五、技术发展前瞻:导航系统的演进方向
AGV导航技术正朝着更加智能、灵活、集成的方向发展,多重技术的融合应用成为主流。
多传感器融合导航成为解决复杂场景的高效方案。通过将激光、视觉、惯性导航等技术组合使用,弥补单一技术的局限性。如在重载AGV上,除了常规导航定位,还可结合三维点云视觉识别,实现毫米级纠偏。
AI技术与物流装备的深度融合正推动AGV导航系统向“自适应、自决策”的更高阶段演进。自然导航(激光SLAM) 正成为技术发展的主流方向。这一导航方式无需借助任何辅助标记,机器人能够按照算法规划路径自主移动。无需改造工厂环境,遇到工人和货物能自主避障和绕行,充分满足了企业柔性生产需求。
5G与边缘计算的应用将进一步提升AGV导航系统的实时性和可靠性。通过5G低延时特性,结合边缘计算能力,重载AGV可以实现更高效的数据处理和更快的响应速度,为真正的智能工厂奠定基础。
从技术发展历程可见,为解决“窄巷道内灵活转向、载重量提升、精准对接”等多道难关,行业尝试了多种导航方案,最终催生了多传感器融合的解决方案。这种技术突破,恰恰体现了精准导航技术与机械结构创新的完美结合。
未来,随着AI技术与物流装备的进一步融合,AGV重载搬运机器人的导航系统将更加智能、灵活,从“无人搬运”迈向自适应、自决策的更高阶段,为智能制造注入新的动力。







