
驾驶型平板运输车防侧翻设计,重心计算与液压支腿联动控制策略
在重型物料搬运领域,稳定与安全始终是核心诉求,而侧翻风险则是行业长期面临的严峻挑战。
在现代工业生产和大型工程建设中,驾驶型平板运输车承担着重型物料的搬运任务。由于其独特的车身结构、高载重量以及较高的重心位置,侧翻风险始终是悬在操作人员和企业头顶的达摩克利斯之剑。
传统平板运输车在应对复杂路况和紧急工况时,往往依赖操作人员的经验与简单机械保护,安全性存在显著不足。新乡奥特能推出的防侧翻设计,通过高精度重心计算与液压支腿联动控制的深度融合,为这一行业难题提供了创新性的解决方案。
防侧翻设计的核心挑战
平板运输车的防侧翻设计面临多重复杂挑战,首要问题便是重心位置的动态变化。车辆在负载状态下,重心高度显著增加。以重型自卸车为例,在严重超载状态下,整车在15.4°的斜坡上就可能发生侧翻。
其次,复杂路况带来的不确定性也是重要因素。车辆在颠簸路面、坡道路面或急转弯时,所运输设备会承受不同程度的振动和冲击,这对车辆的稳定性能构成了严峻考验。
此外,紧急情况下的系统反应速度同样至关重要。传统机械式保护系统响应迟缓,无法在侧翻发生的关键窗口期——通常是毫秒级时间内做出有效干预。
核心技术原理:重心计算与液压支腿联动
新乡奥特能开发的驾驶型平板运输车防侧翻系统,基于两项核心技术:高精度重心实时计算和液压支腿快速联动控制。
系统通过建立车辆多自由度动力学模型,实时监测车辆运行中的关键参数,包括横摆角速度、质心侧偏角、簧上质量侧倾角等。基于零力矩点(ZMP)理论,系统能够在车辆侧倾过程中找到使车辆重力力矩和惯性力矩相互抵消的关键点,从而构建具有预测功能的侧翻指标。
横向载荷转移率(LTR)是系统判断侧翻风险的关键指标。当该指标超过预设阈值时,系统会立即触发防侧翻措施,在0.5秒内完成稳定补偿。
液压支腿系统采用电控PID算法,实现闭环控制,使马达转速紧密跟踪理论瞬时转速,双机构同步驱动,保证支腿间均匀、平稳地完成偏摆动作。
下面的流程图清晰地展示了防侧翻系统的工作机制: 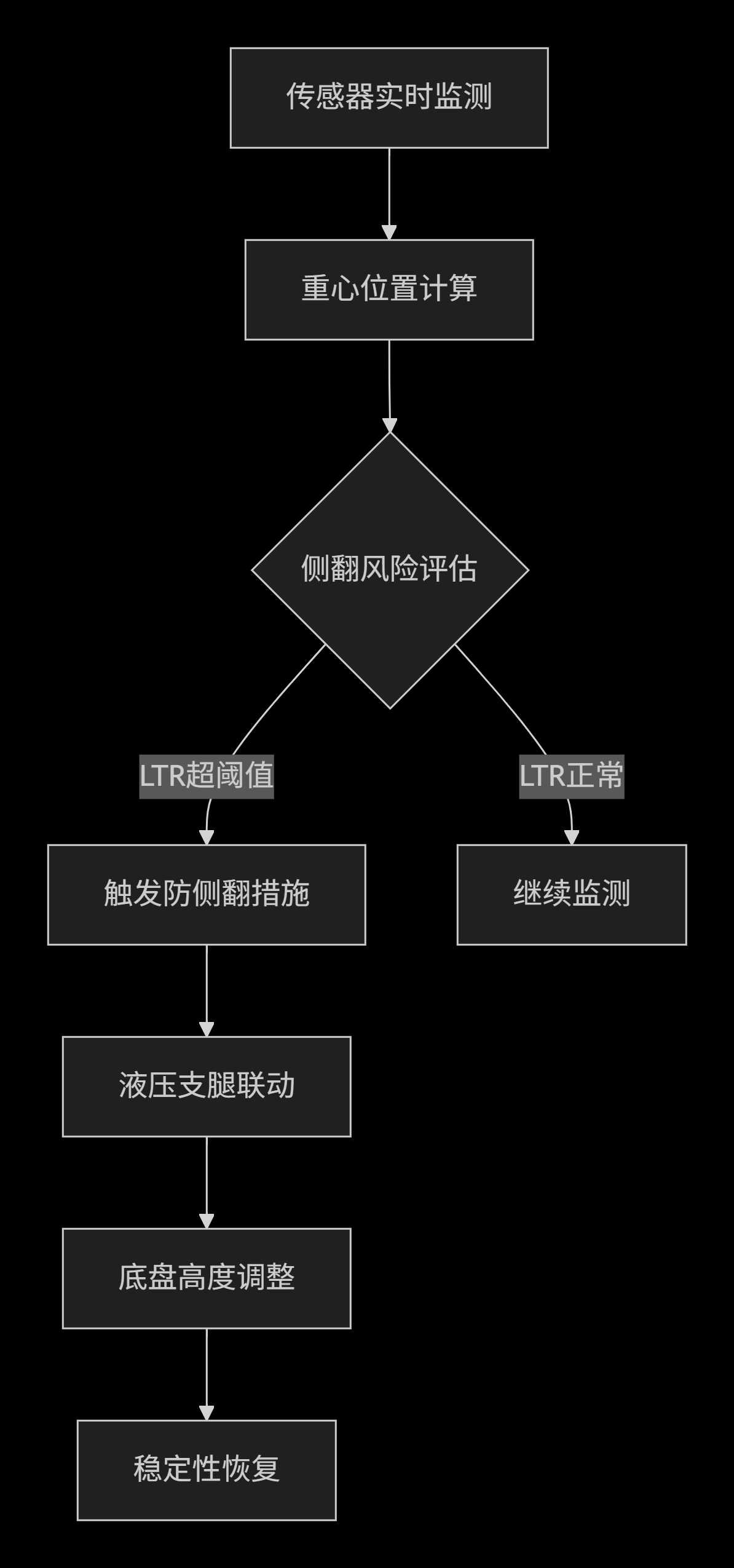
与传统设计的对比优势
与传统平板运输车相比,新乡奥特能的防侧翻设计在多个维度实现了技术突破。下表详细对比了两种方案的核心差异:
| 对比维度 | 传统平板运输车 | 新乡奥特能防侧翻设计 |
|---|---|---|
| 侧翻检测机制 | 基于简单角度传感器,反应滞后 | 基于改进TTR的预警算法,提前预测风险 |
| 控制系统 | 人工操作或简单机械控制 | 基于改进鲸鱼算法优化模糊PID控制器 |
| 支腿动作 | 手动控制或独立动作 | 电控PID算法实现双机构同步驱动 |
| 抗倾覆能力 | 主要依赖车辆自重 | 通过液压支腿和底盘调整主动抗倾覆 |
| 适用工况 | 平坦、坚固路面 | 复杂路面和倾斜工况 |
| 响应时间 | 通常大于2秒 | 小于0.5秒 |
在具体性能指标上,新乡奥特能的系统能将侧翻临界角度从传统设计的15-18°提升至25-28°,大幅提升了车辆在斜坡作业时的安全边界。系统通过行程阀控制和双向液压锁设计,确保支腿仅在达到预定位置时才执行后续动作,有效避免了误操作导致的稳定性问题。
行业应用场景与解决方案
重型制造业应用
在重型装备制造工厂中,平板运输车常在狭窄的车间通道内穿行,同时承载价值高昂的大型设备。任何侧翻都可能造成数百万元的经济损失和生产中断。
新乡奥特能的防侧翻运输车通过实时重心计算和液压支腿快速响应,完美适应这一挑战性环境。系统通过滑动机构包括两个相互垂直的滑动组件、固定板和控制组件,实现多维度的重心调整。一旦检测到侧翻风险,立即通过支腿伸展扩大支撑面,同时调整底盘高度分布重心,在极短时间内完成稳定补偿。
大型基础设施建设
在桥梁建设、大型水利工程等场景中,平板运输车经常需要在临时道路或倾斜路面上作业,这些不确定路况极大地增加了侧翻风险。
新乡奥特能的解决方案采用了双向物料倾覆设计和多模式适应能力。车辆在非卸料时,能够在车辆倾斜时智能改变车辆的重心位置;在卸料时,可以通过调整料斗重心位置,实现快速翻转。这种双重保障机制确保了车辆在各种复杂工况下的作业安全。
技术实现细节
侧翻预警算法
新乡奥特能开发的侧翻预警系统基于改进的TTR(Time-to-Rollover)预警算法,能够提前识别侧翻风险并采取干预措施。试验结果表明,该侧翻预警控制器可有效进行车辆侧翻提前预警,并通过警示装置警告驾驶员及时修正操纵,从而避免重型车辆侧翻的发生。
液压支腿联动控制
液压支腿系统包含行程阀控制和双向液压锁设计。当行程阀的触头处于下压状态时,第二回路连通;行程阀的触头处于上弹状态时,第二回路截断。这种设计保证了支腿在达到预定位置时才能执行后续动作,避免了误操作导致的稳定性问题。
系统采用平板油缸与支腿油缸共用一联多路阀的创新设计,通过支腿回路行程阀的通断实现联动控制,既降低了成本又保护了支腿,同时显著提高了作业安全性。
未来发展与展望
随着传感器技术和控制算法的持续进步,驾驶型平板运输车的防侧翻设计也将不断进化。新乡奥特能正在研究基于数字孪生的预测性防侧翻系统,通过构建车辆虚拟模型,在实际运行前模拟各种工况下的稳定性表现。
借鉴重型商用车辆主动防侧翻控制方法,通过单侧车轮制动产生额外的横摆力矩和防侧倾杆产生的侧倾力矩来抵抗侧翻,这些跨领域技术融合将为平板运输车的安全性能带来新的提升。
结语
驾驶型平板运输车的防侧翻设计是一项涵盖机械结构、液压传动、自动控制和多体动力学的复杂系统工程。新乡奥特能通过重心计算与液压支腿联动控制策略的综合应用,以创新技术有效解决了这一行业难题。
随着技术不断成熟和应用场景拓展,智能防侧翻系统将成为重型平板运输车的标准配置,为行业安全设立新的标杆,助力企业实现更安全、高效的重型物料搬运作业。







